Trekker Engineering Ltd.
I provide consulting services in new technology development and systems engineering. Clients have been in mining, mineral processing, nuclear, and space.
Wyvern Space
I currently provide services to Wyvern Space, a data-as-a service start-up that is developing nanosatellite-based Earth observation constellation for smart agriculture and other markets. I advise on a range of technology topics, from design and development of deployable optics to mission derisking.
Copperstone Technologies
Copperstone Technologies is an Alberta-based robotics and embedded systems company that delivers automated diagnostics and environmental monitoring in difficult conditions. We design custom amphibious robots and drones for measurement and sample collection in wetlands, ponds, and rivers, as well as in industrial facilities. Copperstone Technologies allow workers to remain out of potentially hazardous locations, while collecting necessary field data at lower cost in a more timely way.
Copperstone was founded by three of my former students: Nicolas Olmedo, Jamie Yuen, and Stephen Dwyer. I have been pleased to work with them, and CEO Craig Milne PhD, to deliver the promise of automation for industrial operations.
In 2014, we began building amphibious robots for mining operations in Northern Canada, some of the harshest conditions in the world. We needed a robot that could carry heavy payloads across tailings ponds, in conditions that can be wet, muddy, snowy, and often sticky (sometimes all on the same day). No technology could handle all of the required situations: boats could not handle shallow water or debris; aerial vehicles couldn’t carry the required payloads; and tracked and wheeled robots sank in the mud. Our first prototype sampling robot, based on a Clearpath Husky and heavily modified with additional payloads, operated well on partially dried tailings with a crust.

However, industry experts advised us that an amphibious rover was needed for characterizing soft tailings to improve tailings management. Inspired by designs of the past (https://en.wikipedia.org/wiki/Screw-propelled_vehicle), we modernized the screw-drive concept and developed a robotic screw-propelled vehicle. It moved extremely well on water and mud. You can see it here:
We then took it to operating mines and tested it under remote control on different tailings environments. We discovered the limitations of a scroll-propulsion system on harder surfaces. It could roll easily, but turning was difficult.
Here is my original sketch, made during those trials of the AR-1 rover, on a way to overcome that problem:
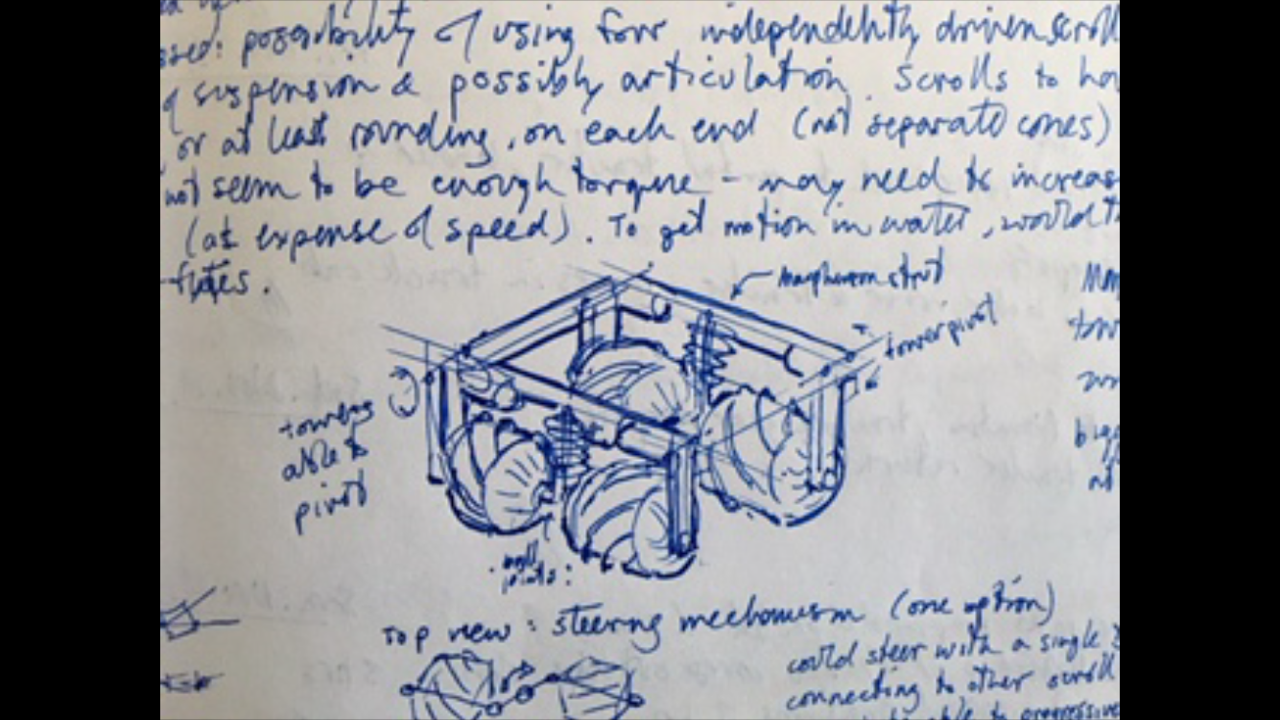
The idea is to use four screws instead of two. In that way, the machine can use screw propulsion on water and when soft soil permits, and then switch to wheel locomotion when soil is hard or steep. This short video illustrates the concept.
Eighteen months later, we produced this new unit: the Copperstone AR-2 amphibious demonstration rover, a much larger unit capable of carrying a payload of 250 kg.

We successfully deployed AR-2 , with its novel (and patented) four-scroll propulsion system, to roll on land and use screw propulsion on mud and water. AR-2 carried a set of custom planting systems for a parametric study of planting density and fertilizer requirements for faster dewatering and consolidation.
This research work continues with Dr Amanda Schoonmaker at NAIT and CNRL, to design and deploy a robotic system to navigate in very soft tailings and plant water-tolerant seedlings, as well as to push the limits of how planting is done, possibly even in winter when larger equipment can be deployed, or multiple lifts of deposited material each year.
The performance of the AR-2 rover exceeded our expectations in some ways, but it was a bit underpowered. We have modified AR-2 and since deployed it in Quebec and Labrador in iron ore operations for geotechnical measurements and sampling of water and soils with a range of interchangeable payloads, including a vane shear viscometer and cone penetrometer.
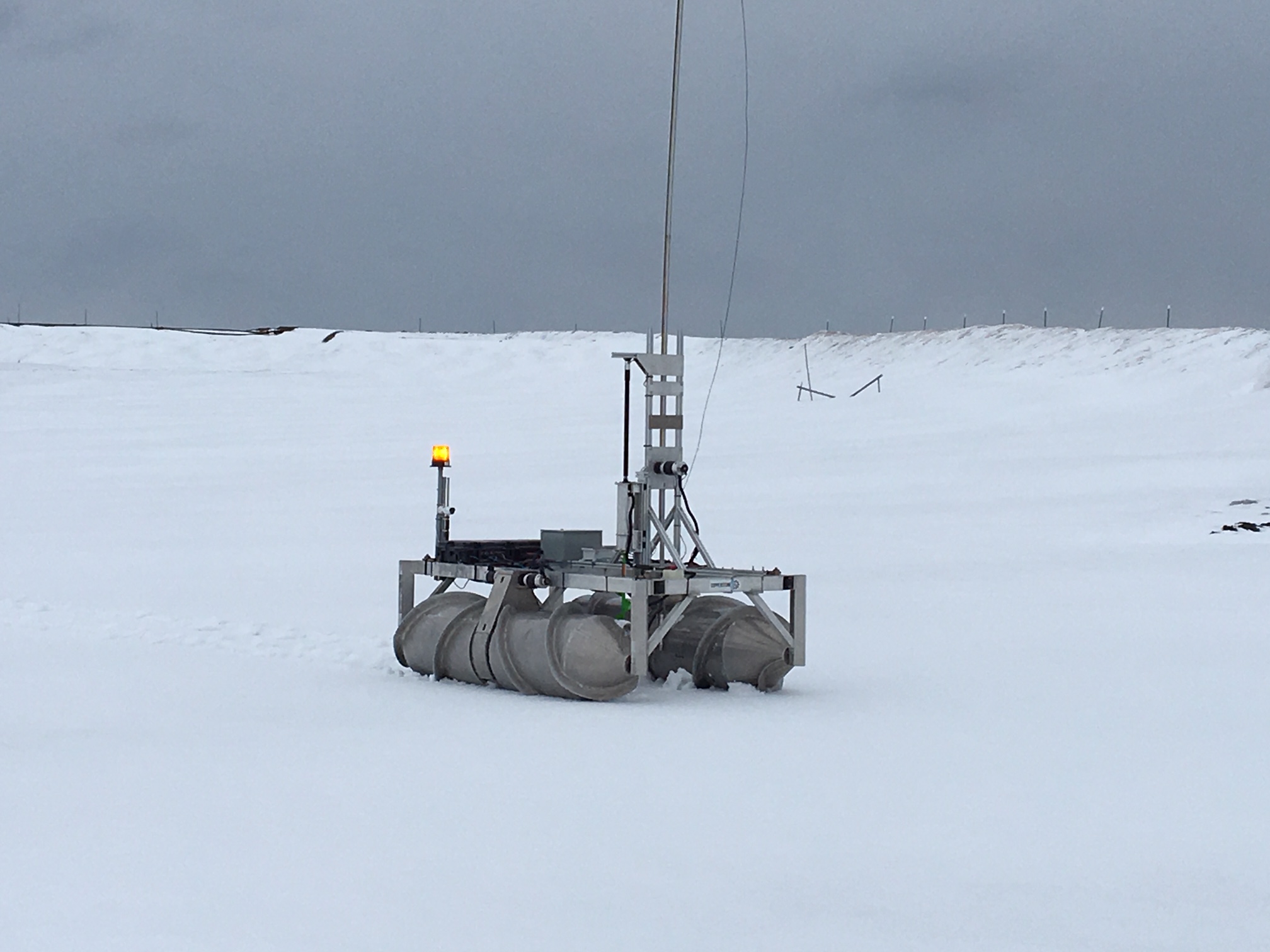
These two video clips show AR-2 rolling on sand and scrolling on snow, while carrying samplers or geotechnical instruments that are deployed using the mast.
This unit has continued to perform extremely well, and it has been used for two tailings geotechnical campaigns at operating mines in Northern Alberta, Western Canada, Ontario, and Quebec. These campaigns have included CPT measurements, water sampling, bucket sampling of freshly poured tailings (a first!) to observe process performance, and deploying a robotic piston sampler to greater than 4 m depth to retrieve samples from more than a kilometre from shore.
The next evolution of this amphibious rover has been to add autonomy and more versatility.

The next demonstration prototype, AR-0, was a smaller unit (about 1.3 m x 1 m), which has been used for bathymetric surveys using a single-beam sonar unit. Other payloads up to 25 kg can also be added. These video clips show AR-0 entering the water from shore, navigating on water, and exiting water back onto shore:
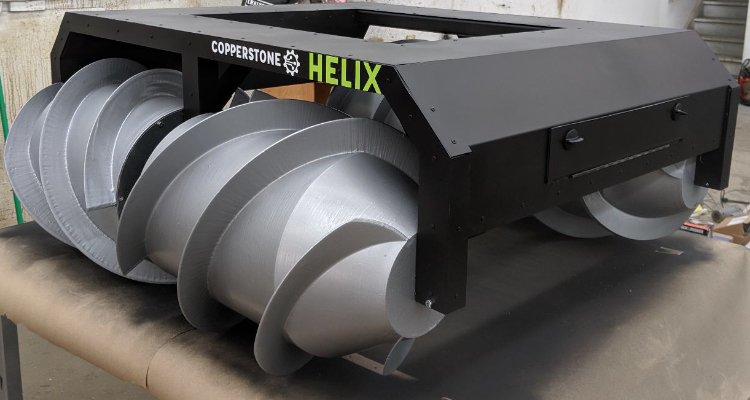
Able to travel over 1.4 m/s (3 mph), navigating autonomously over water and terrain, this rover has been redesigned and is now commercially available as the Helix 25, shown here with the basic frame and no payload mounted. Motors are internally mounted, and batteries and electronics are sealed in the frame enclosures. A range of custom payloads can be integrated with on-board 200 W power and ethernet connections. One of the first applications was to use it in Winter 2020 as part of a river ice research project. It has also been used for bathymetric surveys.
This design was the basis for the Copperstone Neptune, a larger rover that can carry a 100 kg payload, as well as being able to deploy a submersible robot for underwater visual inspections. Future generations of the Helix platform will include the capability to push geotechnical tools with up to a ton of force more than 25 m deep.
It is very exciting to see this technology being used for environmental monitoring in a wide range of application areas. I remain involved with Copperstone as an advisor, and I look forward to seeing the next innovations!
Contact info@copperstonetech.com for more information.